|
| Andrzej Pochodaj,
Co to jest system “diferrential
GPS” i na czym on polega. System GPS działa w oparciu o 24 satelity rozmieszczone na 6 orbitach nachylonych pod kątem 55° do równika i przebiegających na wysoko¶ci ok. 10000 m. Zapewnia to możliwo¶ć odbioru co najmniej 4 satelitów w dowolnym punkcie na Ziemi i otaczającej ją przestrzeni, a także o dowolnym czasie. Pozwala to na okre¶lenie pozycji (do czego wystarczają tylko 3 satelity) i wysoko¶ci (potrzeba do tego danych z 4 satelitów). Zasada wyznaczania pozycji opiera się na bardzo precyzyjnym pomiarze odległo¶ci odbiornika GPS od satelitów, których położenie jest znane w każdym momencie (wszystkie z satelitów monitorowane są przez stację naziemną). Okre¶lenie odległo¶ci dokonuje się na podstawie bardzo dokładnego pomiaru czasu między emisją sygnału (zawiera sygnał rozpoznawczy, położenie, czas emisji) z satelity a chwilą jego odbioru. Odbiornik GPS odbiera najkorzystniejsze sygnały do obliczenia własnej pozycji. W niezwykle krótkich odstępach czasu, między odbiorem kolejnych sygnałów, pozycja okre¶lana jest na podstawie ostatnich danych dotyczących prędko¶ci i KDd. Oczywi¶cie na dokładno¶ć pracy GPS wpływają także różnego rodzaju zakłócenia - naturalne i wywoływane sztucznie. Do zakłóceń naturalnych - zresztą bardzo niewielkich - należą: nieprecyzyjne zgranie zegara odbiornika z zegarami satelitów (kłania się jako¶ć sprzętu); zakłócenia następujące poprzez interferencję fal pochodzących np. z nadajników VHF czy fal odbitych. Te naturalne zakłócenia występują w zasadzie zawsze i powodują one niedokładno¶ć pozycji rzędu +/- 25-35 m, a gdy aktywno¶ć słońca jest bardzo mała tylko +/- 10 m. Rząd USA zdając sobie sprawę z tego, że urządzenia o tak wielkiej dokładno¶ci mogą być niebezpieczne w rękach potencjalnych wrogów czy terrorystów, wprowadził sztuczne zakłócenia tzw. Selective Availability (SA) dotyczące jednakże tylko cywilnych odbiorników GPS. SA wywołuje przekazywanie nieprawdziwych danych o czasie i pozycji poszczególnych satelitów, co zwiększa niedokładno¶ć w okre¶leniu pozycji nawet do +/- 100 m. Zakłócenia te obejmują 95% czasu emisji danych przez satelity (50% emitowanych zakłóceń daje nam możliwo¶ć okre¶lenia pozycji z dokładno¶cią do 50 m, pozostałe z dokładno¶cią 50-100 m). Dobrze by było, aby zdali sobie z tego sprawę ci, którzy próbują np. wchodzić w główki portu czy nawigować w wąskich przej¶ciach w czasie bardzo złej widoczno¶ci opierając się jedynie na informacjach uzyskanych z odbiornika GPS.
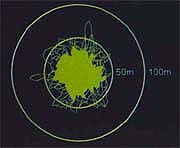
24 godzinne wykresy dokładno¶ci "zwykłego" GPS i dGPS Aby zwiększyć dokładno¶ć okre¶lanej pozycji, a także czę¶ciowo uniezależnić się w tym względzie od rządu USA, opracowano system differential GPS (dGPS). System ten polega na odbiorze pozycji z satelity przez bazowy odbiornik GPS i porównanie jej z własną, niezwykle dokładnie okre¶loną. Odbywa się to poprzez zestawienie odległo¶ci - między satelitą a bazowym odbiornikiem - wskazywanej przez dany sygnał z satelity a odległo¶cią obliczoną dzięki znanej pozycji bazowego GPS. Wyznaczona różnica tych dwóch odległo¶ci stanowi poprawkę okre¶laną mianem pseudo-range correction. Poprawka ta jest natychmiast transmitowana do odbiorników dGPS pracujących w tym samym rejonie co bazowy GPS (odbierają te same emisje z tych samych satelitów), które wprowadzają ją do danych odebranych przez “normalny” GPS i korygują sygnały dla których obliczona została poprawka. Może się oczywi¶cie zdarzyć, choć jest to bardzo mało prawdopodobne, że pozycja poprawiona jest mniej precyzyjna od odebranej bezpo¶rednio z satelitów. Przypadki takie mogą mieć miejsce wtedy gdy odbiornik dGPS znajduje się na granicy zasięgu fal na których przekazywane są poprawki (zwykle zasięg wynosi kilkadziesiąt Mm). Niezwykła precyzja działania urządzeń typu dGPS pozwala na dokładne wy¶wietlenie: pozycji +/- 1-10 m, a co za tym idzie dokładniejsze niż w GPS wyznaczenie KDd, prędko¶ci nad dnem, kursu do punktu drogi czy człowieka za burtą (funkcja MOB) czy automatycznym uruchomieniu alarmu kotwicznego przy znosie większym niż np. 20 m. Porównanie informacji otrzymanych z odbiornika dGPS z namiarami kompasowymi i prędko¶cią po wodzie umożliwia obliczenie aktualnych parametrów prądu czy dewiacji.
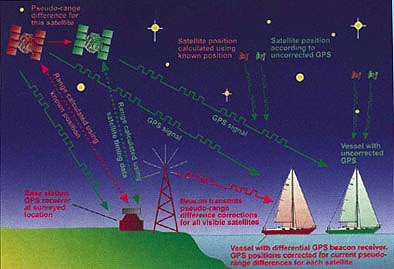
Schemat działania systemu dGPS W chwili obecnej - w krajach zachodnioeuropejskich - są instalowane cztery publiczne systemy przekazywania poprawek. Są to dopiero pierwsze kroki ku stworzeniu nowego systemu dla celów nawigacji morskiej, lądowej i lotniczej, będącego oczywi¶cie jaką¶ pochodną GPS. Publiczne zespoły transmisji poprawek pracują zwykle w systemie emisji sygnałów RTCM SC-104, co umożliwia odbiór poprzez coraz popularniejsze urządzenia dGPS (odbiornik Autohelm – cena w 1996 roku wynosiła 699 Ł). Oprócz systemów publicznych istnieje wiele stacji komercyjnych, głównie o zasięgu lokalnym, ale także globalnych (np. Omnistar, Racal Landstar) przekazujących swoje dane poprzez satelity komunikacyjne. Najczę¶ciej systemy lokalne tworzone są na potrzeby władz portowych pomagając w nawigacji pilotowej. W większo¶ci krajów zachodnich istnieje po co najmniej jednym systemie komercyjnym obejmującym cały lub większo¶ć kraju (np. w Wielkiej Brytanii - Focus FM, w Szwecji - P3). Dostępne są one po opłaceniu wysokiej subskrypcji (136 Ł rocznie za dokładno¶ć rzędu +/- 10 m, 680 Ł za dokładno¶ć +/- 1-2 m) i zakupie kosztownego odbiornika (ok. 250 Ł). 25 krajów zrzeszonych w International Association of Lighthouse Authorities (IALA) rozważa możliwo¶ć stworzenia spójnego systemu nawigacji brzegowej w oparciu o morski dGPS, o dokładno¶ci +/- 10 m, pracującego na częstotliwo¶ciach 283-325 kHz i zasięgu dochodzącym do 100 Mm. W Europie i USA planuje się pokrycie nim całej linii brzegowej, a w pozostałych krajach jedynie portów i rejonów szczególnie trudnych dla nawigacji. Zwiększyłoby to znacznie bezpieczeństwo żeglugi przybrzeżnej w której wydarza się większo¶ć wypadków i katastrof morskich.
Przykład rozmieszczenia wybranych sieci dGPS Istnieje także możliwo¶ć powoływania lokalnych systemów na krótki czas, a to dzięki przeno¶nym bazowym GPS. Na przykład w czasie trwania regat America Cup w 1995 roku specjalnie stworzono przez firmę Trimble Navigation system dGPS. Każdy jacht wyposażony był w odbiornik poprawek połączony z terminalem Inmarsat C, co umożliwiało ciągłe monitorowanie niezwykle dokładnej pozycji jachtów, nanoszenie jej na graficzne mapy, analizowanie danych przez sędziów a nawet pokazywanie w TV. Dzięki takiemu obrotowi spraw, które umożliwiają cywilom okre¶lanie pozycji z większą dokładno¶cią niż wojskowe GPS oraz z promocją rosyjskiego systemu satelitarnego GLONASS (wolnego od zakłóceń typu SA), można się spodziewać w najbliższych latach wyłączenie przez władze wojskowe USA zakłóceń SA. Oczywi¶cie znajdzie się wielu oponentów, którzy będą uważać tak dokładnie okre¶loną pozycję czy inne parametry żeglugi za zupełnie zbędne czy wręcz urągające dobrej praktyce żeglarskiej, ale tak było i w chwili pojawienia się Decci, Lorana czy GPS. |